智能免示教焊接系统,兼容KUKA、FANUC、ABB、安川四大家族机器人以新松,纳博特等国产机器人,配合敏越科技自主研发的激光焊缝跟踪系统SmartEye+RobotSmart智能决策系统,实现了“免示教” 的智能化作业模式,帮助厂家解决了编程难度大、智能化水平低下的生产痛点,同时满足对小批量、不同型号工件的焊接生产要求,提高加工效率和成品率。
免示教焊接系统

系统硬件组成
整套系统由机械手、激光焊缝跟踪系统、 工业控制器三部分构成。机械手依据线激光视觉传感器提供的轨迹 执行焊接,线激光视觉传感器获取焊接工件的三维数据, 工业控制器进行定位和纠正焊接轨迹的运算。工业控制器和机械手之间、工业控制器和线激光视觉传感器之间均通过以太网进行数据通讯。
系统软件组成
免示教焊接系统软件,主要为RobotSmart智能决策系统,实现工件轨迹自动规划,机器人运动程序自动生成,并结合SmartEye激光焊缝跟踪软件平台,确保实际工件的焊接质量。
激光焊缝跟踪系统SmartEye
敏越科技自主开发的激光焊缝跟踪系统SmartEye。系统基于嵌入式线激光视觉传感器, 以人工智能算法加持,辅以丰富的焊接 工艺库,为高端焊接机器人应用提供三维焊缝检测、纠偏引导, 真正实现柔性焊接、提升焊接质量。
激光焊缝跟踪系统SmartEye 可实现对焊接轨迹的实时纠偏和补偿,对光照、粉尘等环境具有强适应性,具有体积小、精度高 的特点。软件界面,可适应多种类型的焊接工艺。

Robotsmart智能决策系统
敏越智能决策系统RobotSmart 能快速生成机器人运动轨迹,有效解决焊接轨迹示教复杂、编程效率低、机器人利用率低等现场编程问题。
Robotsmart 智能决策系统通过在软件中导入工
件模型,选取三维模型上的点、线、面等信息生成 工件的焊接轨迹点及其位姿,同时生成可直接在机械手端使用的机械手程序,以及用于视觉定位的点云模型和创建的用户坐标系等信息。

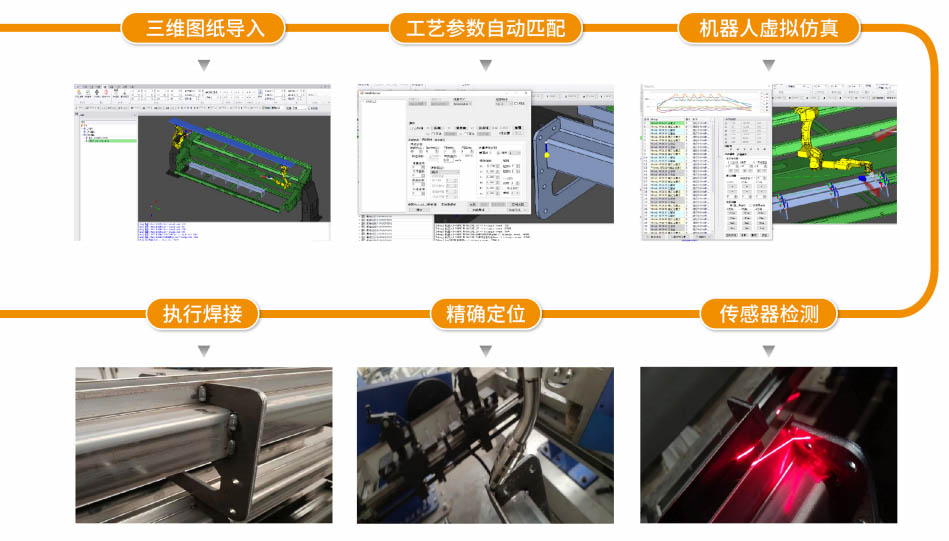
免示教焊接流程
免示教焊接方案优势
极大提升编程效率
特定场景下,软件可通过阵列、镜像、偏移快速生成焊接程序,减少重复编程。

方格类工件焊接:编程时间:2小时一>10分钟

风机叶轮零件:编程时间:4小时 一10分钟
复杂零件可实现自动规划机器人路径,极大缩短编程时间。

大型复杂工件焊接 : 编程时间 : 20小时 一 3小时

撬体类工件 : 编程时间 : 6小时 一> 1.5小时
可视化编程操作

真实还原现场设备状态

焊接流程虛拟仿真分析,指导现场实施部署

机器人轨迹、姿态可视化,自动检测碰撞

多机器人、多设备联动仿真
定制化焊接策略

视觉粗定位:工件摆放位置自动补偿
点寻位焊接:快速编程,操作简单,适用场景广泛
异形轮廓先扫后焊:解决复杂焊接轨迹痛点,工件形变自适应
交点焊接:⻆焊缝精确焊接,提升焊达率
多种焊接工艺

满焊、段焊、点焊、摆焊、电弧跟踪参数化控制

多层 多道 焊接 自动规划 焊道偏移量
支持丰富的使用场景

灵活搭建 各类仿真场景

支持多变位机、多外部轴

内置并支持多种机器人平台